
【TRIO-Basic从入门到精通教程三】轴参数的含义
亲爱的朋友们,经过上节内容的讲解!朋友们对软件应该有了大致的了解!软件时编程的工具,我们更需要的是掌握这门语言!
接下来的文章讲解伺服的轴参数,希望朋友们动手练习并加于讨论!

在工具栏中我们找到轴参数选项
打开轴参数,我们选择我们需要编辑的伺服轴:

我们能够得到下面画面
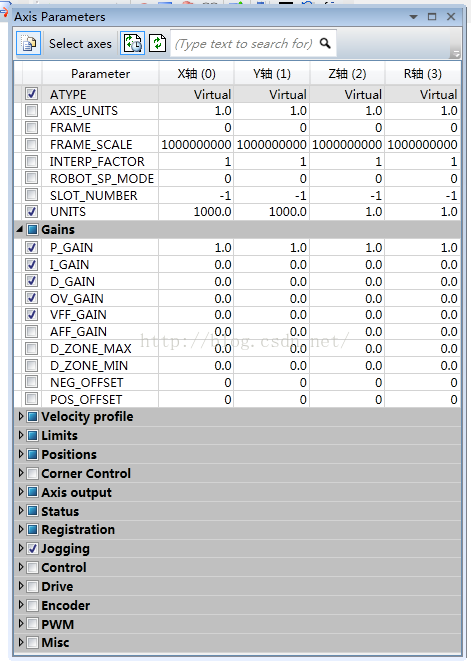
我们依次对轴参数重点内容提供讲解
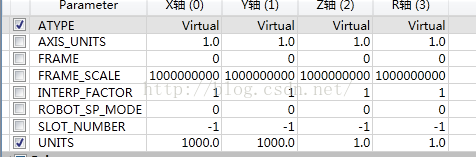
ATYPE轴类型,TRIO提供轴类型如下:
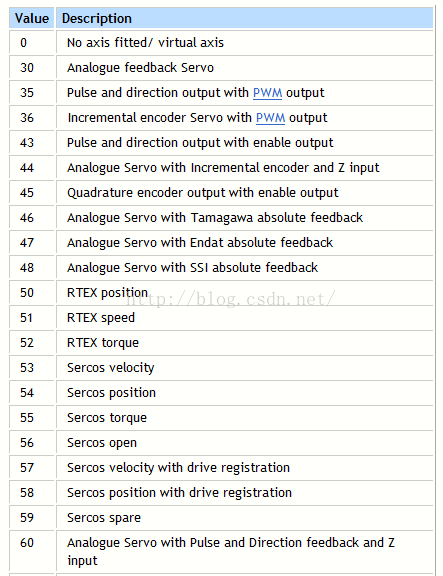
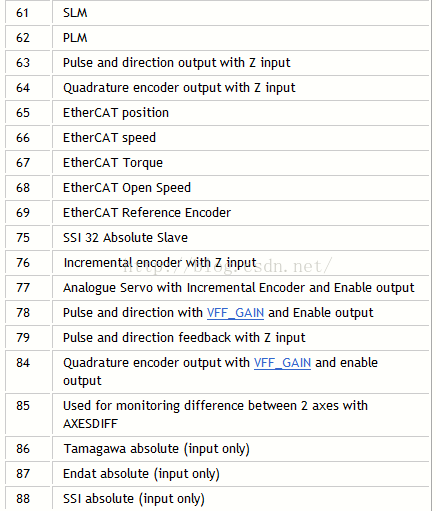
具体内容请查看TRIO BASIC帮助文件,后续的内容会拿出来单独讲解:
UNITS单位当量:一个单位对应的脉冲数
AXIS_UNITS轴单位当量:一个单位对应的脉冲数
UNITS与AXIS_UNITS区别:
UNITS在FRAME=0机器人坐标坐标未启动时代表轴的单位,与AXIS_UNITS含义相同!
在FRAME<>0时代表卡迪尔坐标的的单位当量!
FRAME=0未开启机器人坐标变换,FRAME<>0激活机器人坐标变换!
具体内容请查看TRIO BASIC帮助文件,后续的内容会拿出来单独讲解:
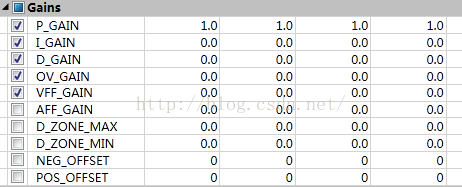
GAIN增益用于闭环控制(速度控制、力矩控制)
P_GAIN比例增益
I_GAIN微分增益
D_GAIN积分增益
VFF_GAIN前馈增益
具体内容请查看TRIO BASIC帮助文件,后续的内容会拿出来单独讲解:
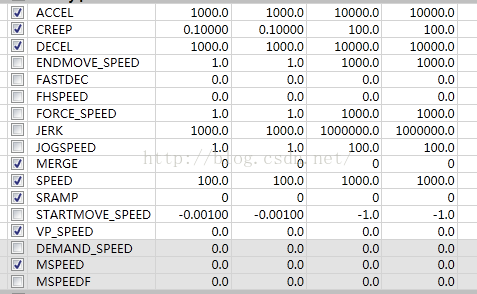
ACCEL加速度速率UNITS/sec/sec
DECEL加速度速率UNITS/sec/sec
ACCEL与DECEL用于运动的加减速速率设定
FASTDEC快速减速速率UNITS/sec/sec,FASTDEC=0急停或者碰到限位等减速度由DECEL决定
SPEED轴速度UNITS/sec
MERGE运动平滑
SRAMP平滑滤波时间ms
MSPEED反馈瞬时速度
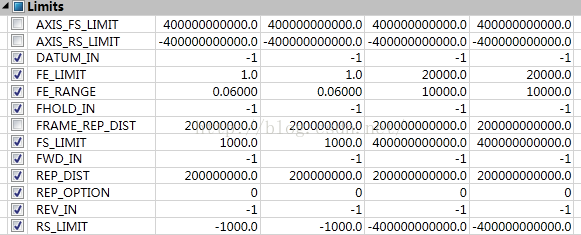
DATUM_IN原点信号输入:这里输入的是0-512IO通道号
FE_LIMIT偏差限制阈值。FE>FE_LIMIT伺服报警
FE_RANGE偏差提醒阈值。
FS_LIMIT正转软件限位
RS_LIMIR反转软件限位
FWD_IN正转硬件限位
REV_IN反转硬件限位
REP_DIST重复位置距离
REP_OPTION重复位置模式
FHOLD_IN轴运动暂停
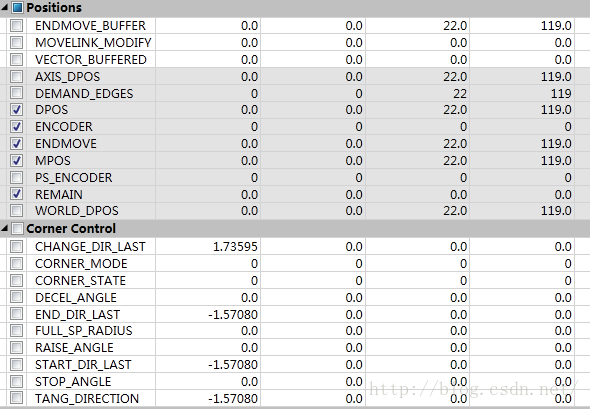
DPOS当前目标位置
MPOS当前反馈位置
具体内容请查看TRIO BASIC帮助文件,后续的内容会拿出来单独讲解:
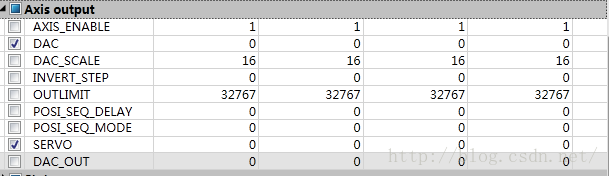
DAC模拟量输出,用于在开环时直接给伺服模拟量电压
SERVO闭环
OUTLIMIT限制输出
AXIS_ENABLE轴使能
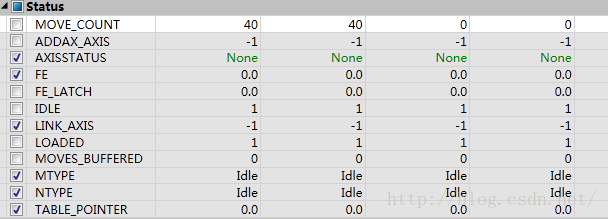
ADDAX_AXIS显示当前轴被其他轴叠加的轴号,-1代表未被叠加
AXISSTATU显示当前轴的轴状态
FE位置偏差,DPOS-MPOS之差
IDLE轴运动完成
MTYPE当前执行的运动
NTYPE下一个队列执行的运动
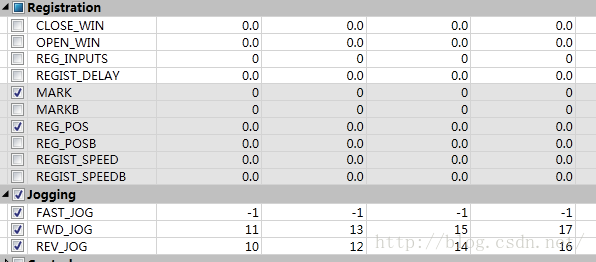
MARK为TRUE时,捕捉色标成功
REG_POS存放色标捕捉成功时的位置值
FWD_JOG正转点动
REV_JOG反转点动
亲爱的朋友,文章到此结束!本文起到抛砖引玉的作用,多看TRIO BASIC文件!轴参数有不了解的参数,回复出来。
我会一一列举讲解!




